
آنها اكنون اميدوارند بتوانند دوربينهاي ويديويي و ديگر حسگرها را بر روي اين فناوري جديد منطبق كرده و از آن براي ورود مخفيانه به ساختمانها و حتي بررسي مناطق زلزله زده براي شناسايي بازماندگان استفاده كنند.

اين پژوهشگران به ايجاد يك تعامل زيستي بيسيم با سوسكها پرداختهاند كه از قدرت زيادي برخوردار بوده و قادر به نفوذ به مناطق كوچك هستند.
ساخت روباتهاي مقياس كوچك براي كار در شرايط ديناميك و نامعلوم بسيار مشكل است و از اين رو دانشمندان تصميم گرفتند كه از سوسكهاي زيست روباتيك استفاده كنند.
اين تيم پژوهشي توانستند در آزمايشات خود به دقت اين سوسك سايبري را در يك مسير پيچيده هدايت كنند.
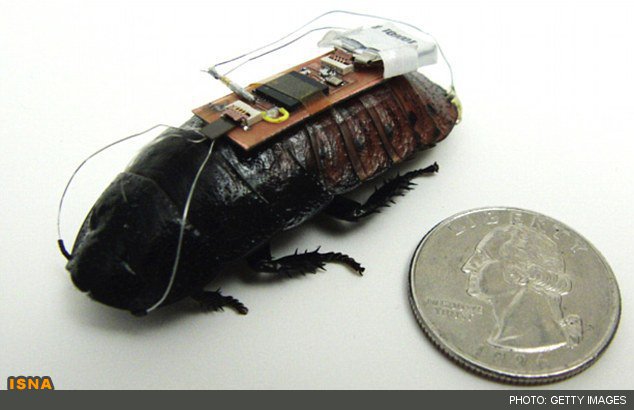
شيوه جديد اين محققان با ادغام يك تراشه كم هزينه سبك و در دسترس با يك گيرنده و فرستنده بيسيم بر روي سوسك ماداگاسكاري كار ميكند.
محموله اين سوسك با وزن تنها 0.7 گرم همچنين حاوي يك ريزكنترلگر است كه تعامل ميان الكترودهاي كاشتي و بافت را براي جلوگيري از آسيب عصبي احتمالي بررسي ميكند.
اين ريزكنترلگر به آنتنها و دم سوسك متصل شده است.
دم سوسك يك اندام حسگر روي شكم اين حشره است كه به طور عادي براي شناسايي حركت در هوا مورد استفاده است و ميتواند نزديك شدن شكارچي را شناسايي كرده و به آن براي فرار سريع كمك كند؛ اما محققان از سيمهاي متصل به دم اين حشره براي به حركت واداشتن آن استفاده كردند. در اين حالت سوسك تصور ميكند كه چيزي در پشت آن در حركت است و از اين رو به جلو ميرود.
سيمهاي متصل به آنتنها به عنوان افسار الكترونيكي عمل كرده و بارهاي كوچكي را به بافت عصبي سوسك منتقل ميكند.
اين بارها باعث فريب مغز سوسك در مورد وجود يك مانع فيزيكي در برابر آنتهاي آن ميشود كه باعث هدايت آنها به جهت معكوس ميشود.
در آزمايشهاي اخير اين محققان توانستند از ريزكنترلگر براي هدايت دقيق سوسكها در مسيري كه به جهات مختلف پيچ و تاب داشت، استفاده كنند.





























